
Custom Production Machinery
Custom production machinery for food processing, oil & gas, and packaging — from full production lines to PoC prototypes, jigs, and workstations. Full design package covering mechanical, kinematics, PCB, wiring, PLC specification, and motor and drive selection across conveyors, presses, bottling, and multi-axis motion control. Electrical and electronic design handled in-house.
The majority of our custom machinery projects are subject to non-disclosure agreements. Additional case studies are available upon request to qualified enquiries.
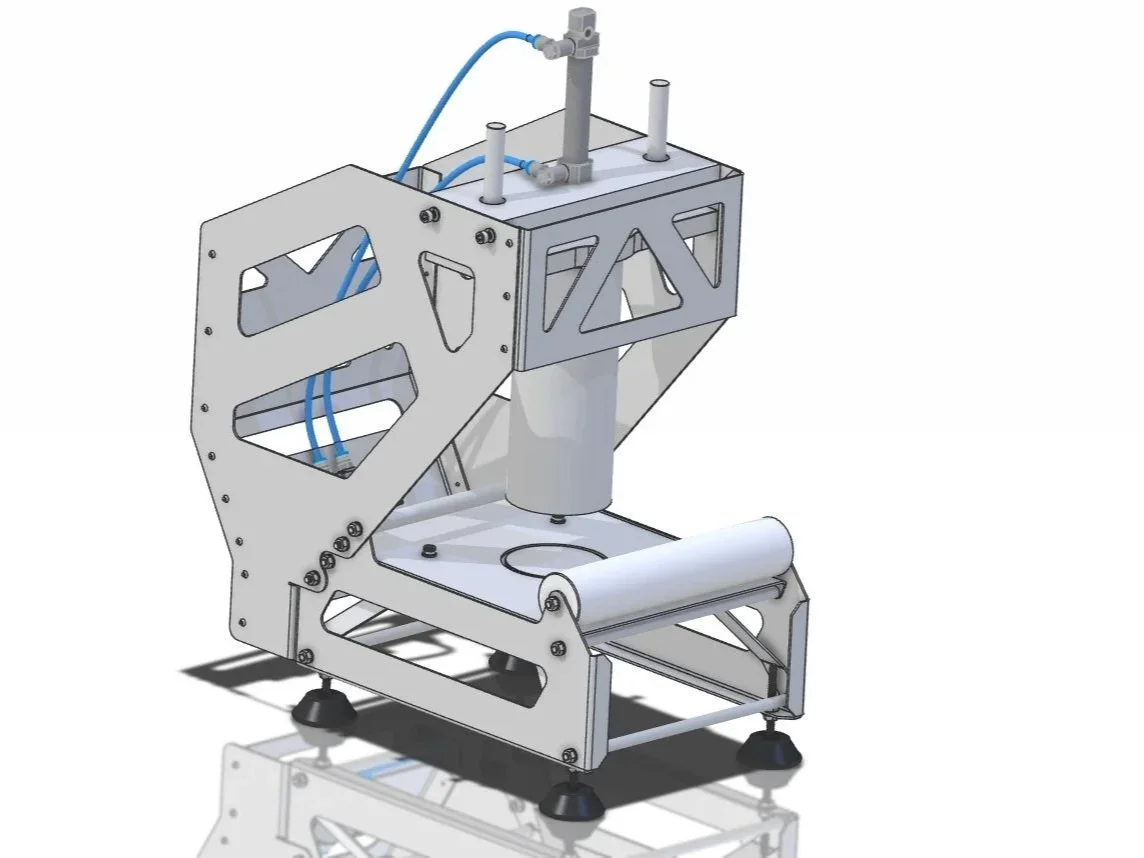
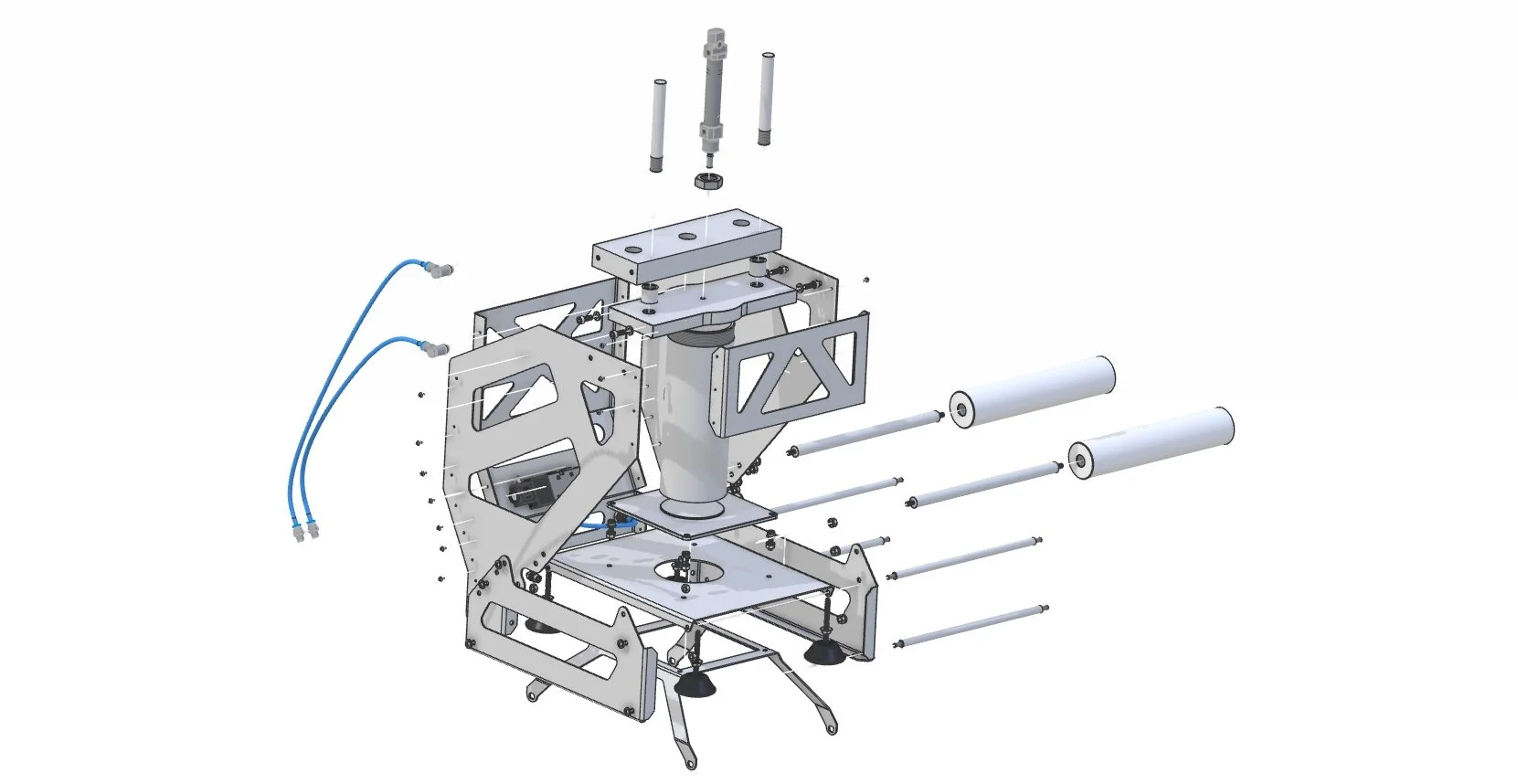
Electropneumatic Pastry Sealing Station*
Custom thermal sealing machine for traditional Greek confectionery — including almond macarons and truffle-style pastries produced for weddings, funerals, and religious functions. Designed as a dedicated station within a larger production line.
A pneumatic ram drives a custom weld die mounted via a pipe to the ram plate, decoupling the heating element from the die geometry — a single heating element serves multiple die profiles without modification to the thermal system. The ram is controlled by an electropneumatic valve driven by an open-source PLC.
Our team was engaged as subcontractors specifically for combined mechanical and mechatronics capability, responsible for the electrical and electronic systems, sensing arrangement, and embedded data extraction architecture for future SCADA integration.
*(pre-production)
Client
George Karyotakis
Year
2026

Modular Robotic End Effector
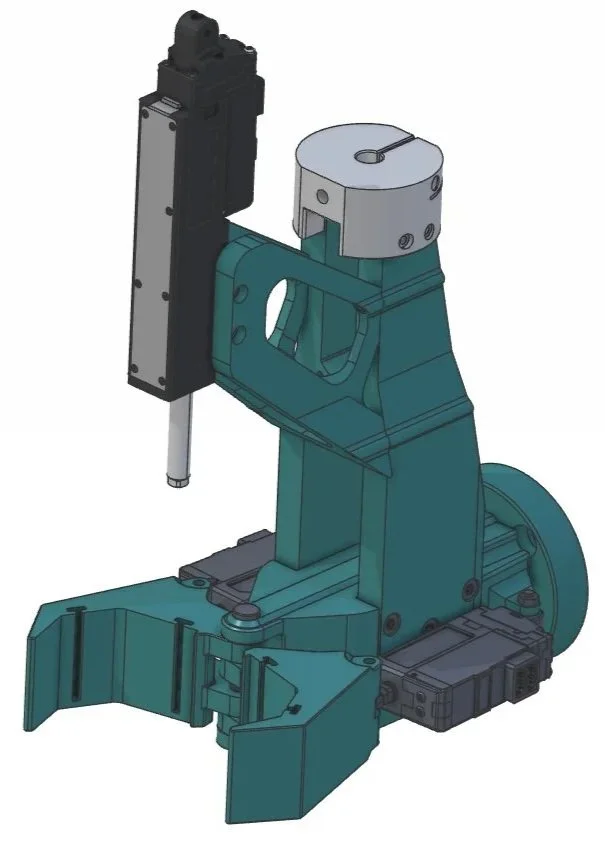
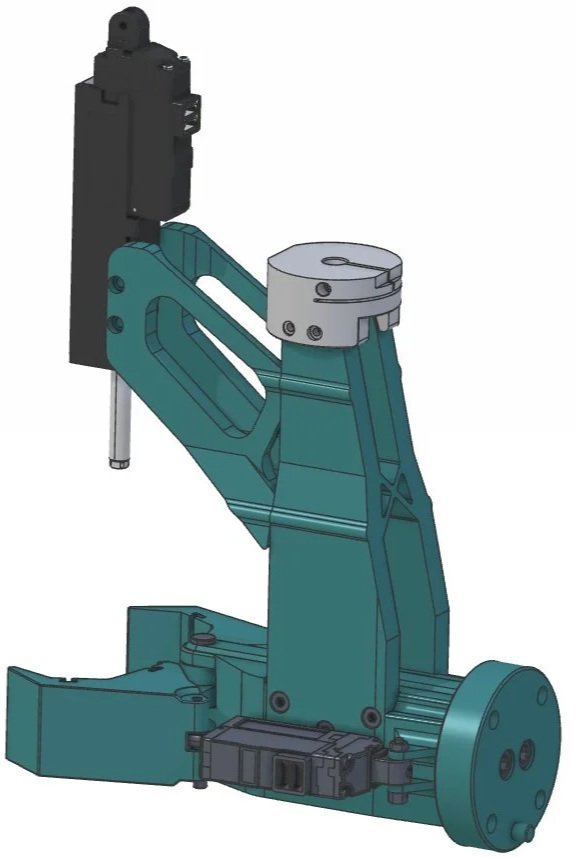
Electric hinged jaw gripper designed for robotic automation applications. The core gripping mechanism uses two identical interlocking jaws — each jaw is the same geometry rotated 180° — driven by a pair of electric linear actuators hinged at both the chassis and the jaw.
The hinge-hinge actuator arrangement ensures the actuating rod sees pure axial load only — no bending moment, no side loading. This allows lighter, lower-cost actuators without compromising grip force or mechanism longevity. The lever geometry multiplies actuator force at the jaw rather than transmitting it directly.
The design is modular: the tower extension and push-down actuator can be removed, and the interface configuration can be switched between the top and rear mounting points. This changes the robot wrist approach angle without altering the gripping mechanism, making the same end effector applicable across multiple automation setups.
(Concept Design)